





满足SAE平视显示器(HUD)测量标准的自动化解决方案
测量彩色物体的亮度
根据 SAE J1757-2 标准,制造商必须达到最低亮度阈值,以确保在任何环境光线条件下(白天或夜晚)叠加到现实环境中的HUD虚拟图像的清晰度。然而,要测量HUD投影中每个虚拟图像的亮度,意味着必须考虑各种物体形状、尺寸、色彩和位置。如果使用基于静态关注点(POI)来定位物体的测量系统,这一过程将需要多个步骤才能完成。对于投射到HUD中的每个物体,静态POI系统将通过查看软件绘制的静态POI窗口来定位目标物体。成像系统将利用该POI来确定将图像中的哪组像素用于亮度测量。如果所投射的物体落在该POI范围以外,可能会导致亮度测量不准确。此外,随着投射变化,或者显示器上出现了新的虚拟图像,在执行亮度测量之前,还必须绘制新的POI,确保将每个新的物体包含在其中。

图6 - 跟AR一样,HUD也会将数字图像叠加到现实环境中。因此,所投射的图像在各种背景下的清晰度将会涉及重要的安全问题。图像必须足够清晰,确保在白天、夜晚以及各种天气条件下都清晰可辨。
有些先进的亮度测量系统提供强大的软件功能,能够将POI设置过程完全自动化,充分适应投射中存在多个物体甚至无法预测物体的需要。举例来说,有一种软件功能称为Auto-POI(自动关注点),其能够创建动态POI窗口,自动适应所定义颜色公差范围内物体像素的需要。制造商可能希望一次性评估投影图像中出现的所有红色物体的亮度。要完成该测量,制造商可以在软件中设置最小和最大CIE色坐标(Cx, Cy),确保将目标物体组中代表的红色值范围包含在内。然后,通过利用自动POI功能,该软件将“对齐”到与所定义的条件相匹配的任何一组红色连续像素,从而创建精确的测量区域,不受物体形状、尺寸或位置的影响。即使出现新的投影,也能够一次性或根据要求采集自动POI范围内与所定义的颜色公差相匹配的物体图像,并测量亮度值。
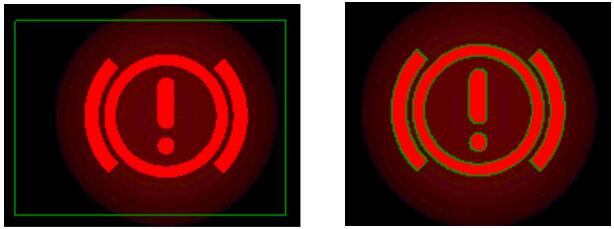
图7 - 软件中手动绘制的静态POI与基于颜色公差和物体变化自动创建的动态POI(自动关注点)之比较。
Auto-POI功能允许一次性对多个颜色组进行编程,从而使制造商能够在一个图像中同时测量所有物体,不受颜色的影响。此外,在指定颜色值公差时,制造商可以选择输入CIE坐标作为数据,也可以在CIE色表上绘制色区(使用光标创建一个椭圆、矩形或多边形)来指定POI公差范围。这些功能可以使测量过程完全自动化,为制造商提供一种“全自动”方法,在定义所有物体颜色后,即可自动执行亮度测量。将Auto-POI功能与电子控制镜头结合在一起,可在物体定位和评估方面带来极大的灵活性,使制造商在每个定义的测量点能够几乎即时完成数据采集。
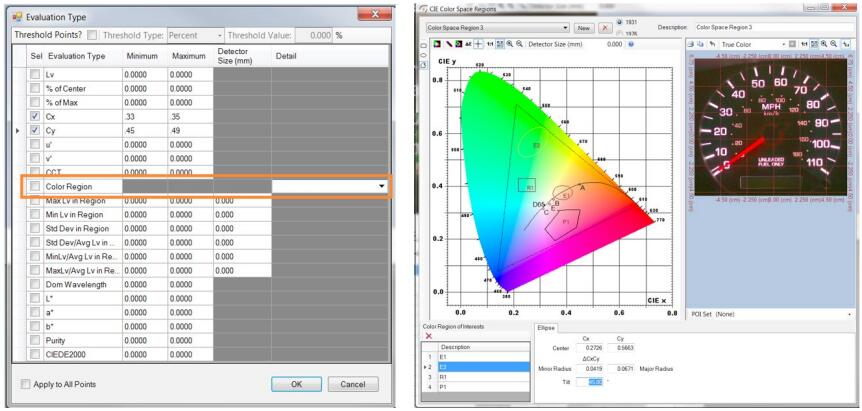
图8 - 通过选择自动POI软件工具中的“色区”,用户能够在CIE色表中绘制不同形状,用于定义应当包含在测量POI组中彩色物体的Cx, Cy公差范围。
测量重影问题
HUD投影中的物体通过HUD系统所发射光线的反射组合来显现。作为主要显示面的汽车挡风玻璃,由玻璃内表面和外表面组成,两面都会接收HUD发射的光线,并从独特的角度将光线反射回驾驶员的眼睛。这些光线反射将创建HUD投影的目标虚拟图像,如果光线发射角度不正确,还会形成“重影图像”。在无法完全对齐的情况下,这种双重图像会导致模糊,可能极大地影响重要HUD投影的可视化。
为了检测和评估HUD投影中的重影范围,测量系统必须能够定位重影图像与目标图像之间关联点的位置。然后,对这些位置进行比较,以确定偏差程度,并提供必要的信息来对HUD进行纠正。如果测量系统的配套软件能够提供图像处理功能,比如图像自动匹配(RADA),则可以使该比较过程实现自动化,通过一次评估自动完成失真图像与目标图像之间关联点位置的比较。RADA功能通常用于处理歪斜、扭曲和错位的图像,并以正确的形状和高宽比呈现它们。由于RADA功能必须获取实际与理想虚拟图像的物体定位数据才能执行该过程,具备RADA功能的检测系统需要预先装备,以采集并比较表明物体位置的坐标数据,从而使图像重影的检测和测量过程实现自动化。
测量图像失真
SAE J1757-2 标准将失真定义为虚拟图像中的每个测量点与目标坐标相比的几何偏差。失真可能包括像差、图像弯曲、扭曲等,所有这些都可以利用原始或测得虚拟图像的边缘像素与二次或目标虚拟图像的边缘像素之间的距离来计算。在HUD中,如果投影图像错位或不均匀,虽然人类的双目视觉会设法将其调和为单一的图像,但这种缺陷可能会导致物体焦距或景深感知错误。如果HUD无法增加与现实物体相对位置相关的数据,还可能会发生投影图像定位错误。这不仅可能会影响安全,而且图像失真还会对显示器的感知质量产生重大影响,进而损害采用该显示器的车辆制造商的声誉。
调制传递函数(MTF)是自动化精确检测图像失真不可或缺的一个参数。MTF用于测量光学系统的成像性能,特别是用于定义相机生成物体图像的功能,检测相机能否以足够高的分辨率采集到对比度(清晰度)足够高的物体图像,确保精确地反映在现实世界中所看到的该物体。相机无法生成与现实难以区分的图像的原因有多种,首先是相机所接收光的特性,相机镜头、传感器分辨率和动态范围的局限性也会进一步对图像产生影响。这些因素会影响图像质量,而当我们基于图像进行软件测试时,图像质量将决定测量精度。MTF参数可用于测量光学系统弥补技术局限性并尽可能正确处理光线的能力。
由于要实现精确测量,必须了解图像失真的起因,因此MTF参数在测量图像失真方面具有重要作用。就跟HUD系统中的异常情况可能会导致投影中出现像差一样,像差也可能是由相机引起的,因为相机需要从HUD投影中采集光的信息来创建CCD图像。如果相机无法提供足够高的光学性能来生成清晰的图像,测量系统可能出现漏报缺陷的情况,未能清晰显示HUD图像失真。这可能会导致后续测试出现问题,无法精确地测量数字物体的尺寸、位置甚至总体亮度,因为相机无法清晰地呈现图像特征和边缘。

 分享
分享
图片新闻















发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论